
科技论文
成员自2018年以来
Performance Motion Devices的技术控制着全球600多万台电机。我们提供可靠的多轴运动解决方案和无与伦比的技术支持;电机设置和调整,运动板设计,电气原理图审查和定制的软件/硬件开发服务。Performance Motion Devices提供全系列的智能集成电路、模块、数字驱动器和电路板,以及易于使用的软件,使您的系统快速投入使用。我们直观的开发工具和通用的运动架构使您的运动系统的设计、开发和验证快速、可预测和低风险。Performance Motion Devices的行业领先客户为我们提供了广泛的应用领域的广泛经验。需要控制多轴应用程序运动的最佳方式?让我们告诉你我们能帮上什么忙。
下内容提交:
工业:
农业与工厂自动化农业,工厂自动化,实验室设备和自动化,医疗设备,运动控制组件制造,制药,机器人和半导体
应用程序:
N/A
查看更多
新的控制技术结合了伺服性能和步进电机成本
发布06/29/2020
作者:Chuck Lewin, Performance Motion Devices, Inc.创始人兼首席执行官
当涉及到步进电机时,一种新的驱动技术叫做步进伺服,它使一切旧的东西重新成为新的,赢得了机器设计师的青睐,他们可能已经把步进电机降级为低成本但低性能的类别。
这种技术的强大之处在于,它可以使用通用的非定制步进电机,但却可以从中获得更多的性能。这是通过增加一个编码器和操作电机,有效地,换向两相无刷直流电机。
编码器是需要的事实意味着真正低成本的应用将不是步进伺服的好候选人。但对于应用程序,否则将有无刷直流电机,步进伺服正日益被视为一种替代方法。
除了提供一个比类似的无刷直流电机更低的成本解决方案,步进伺服实际上可以在加速率和扭矩输出等领域胜过无刷电机。这使得它成为高速点对点移动、纺织设备、线圈绕线、高速电子凸轮等应用的候选人。
那么步进伺服是如何工作的呢?为了回答这个问题,我们将首先快速回顾传统的步进电机控制方案,然后深入研究步进伺服系统的不同之处,以及它们对当今机器设计人员的作用。
你完全掌握了我
步进电机之所以受欢迎,首先是因为它们易于使用。它们不需要编码器来保持其位置,不像直流电刷或无刷直流电机用于定位时,它们不需要伺服控制回路。其优点是成本低,输出扭矩大,无刷运行。它们的主要缺点是振动、噪音和有限的速度范围。
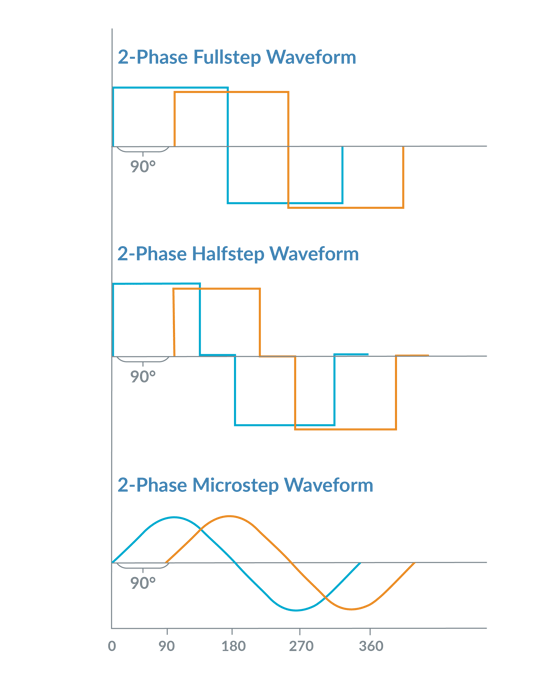
图1:传统步进电机控制波形
图1显示了驱动步进电机的传统波形。步进电机是一个多相装置,意思是多个电机线圈被电激发来产生运动。大多数步进电机有两相,但更奇特的配置,如3相或5相也存在。
在步进电机的世界里,放大器采用的相位技术有特殊的名称,如全步、半步和微步控制。这些不同的技术是指电力水平的数量,适用于每个电机线圈在一个电气周期。无论采用哪种驱动方法,当外部控制器改变电气相位时,电机向前或向后移动。
步进电机通常为每步1.8机械度(90电气度)。这意味着一个1.8度的步进器每机械旋转200步。除了1.8度步进电机,还存在.9度和7.2度等其他配置。
在b区山谷
现在让我们看看电机内部发生了什么,并更详细地了解传统的步进电机是如何操作的。
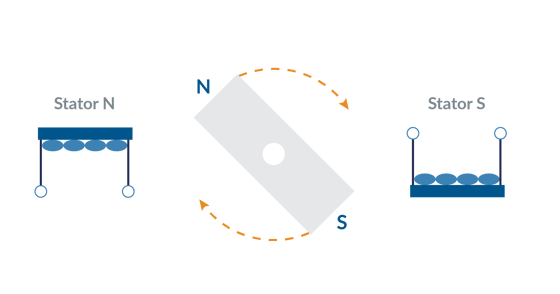
图2:步进电机的旋棒磁铁模型
图2提供了步进电机的简单磁模型。转子可以被认为是一个旋转的棒磁铁,与外部控制的磁场(定子)相互作用。当N-S转子磁场与定子N-S磁场(也称为b磁场)对齐时,所产生的转矩为零,当两个磁场之间成90电度角时,所产生的转矩最大。值得注意的是,实际内部结构的步进电机看起来不像这样,但它仍然是一个有用的方式,以了解电机的运行。
当用电流驱动定子线圈时,就会产生一个正弦力“谷”,驱动步进电机稳定在一个特定的位置。通过线圈的电流越多,力谷的深度就越大。在这个山丘和山谷的力剖面中,无论曲线是水平的,都不会产生机械扭矩,而无论曲线是最陡的,所产生的扭矩都是最大的。
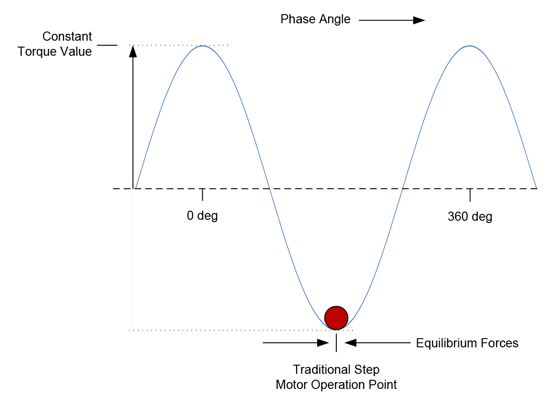
图3:传统步进电机驱动方案
如上图所示,在传统的步进电机驱动方案中,电机位于力剖面的“底部”。在这一点,净旋转电机扭矩产生是零,因为电机是在一个平衡点。这解释了为什么在没有编码器或伺服回路的步进电机中可以保持位置。
为了创造运动,控制器通过外部线圈连接改变定子相位,使这个谷向前或向后移动。电机转子比“下降”向前或向后,保持自己在力谷的底部作为响应。想象一个球落在槽底。
拼命寻找平滑
尽管这个方案方便和简单,但它有许多缺点。这里是一个快速的纲要:
- 不确定的准确性。固定转子的实际位置是内部平衡恢复力和转子上可能存在的任何外力的总和。因此,在给定的应用程序或给定的负载中,精确的实际剖面路径会在很小的范围内发生变化。
- 中档的不稳定。回到球的比喻,当相位角突然改变时,转子将前进,但倾向于围绕平衡点,并最终进入新的相位角。正常情况下,这种沉降过程发生得非常迅速,并不是一个大问题,但当固有振铃频率等于规定的阶跃率时,就会出现一种叫做“中程不稳定”的现象,这可能导致在特定的运行速度下可用扭矩的急剧下降。
- 失去了步骤。一个足够的外力可以推动转子离开它的平衡位置,一直向上,并超过力剖面曲线,进入下一个山谷。这种现象被称为失步,一旦启动,通常会产生逃逸效应,这意味着转子越来越落后于命令的轮廓,最终停止运行。
- 多余的热量。为了解决丢步现象,电机的扭矩水平足以处理最坏情况下的运动轮廓。这意味着在其他任何时候,编程扭矩都高于实际需要,从而产生多余的热量。
- 噪音。步进电机在运动过程中由于一些原因会产生噪声。如果使用全步或半步驱动方案,这些线圈驱动信号的方形边缘在转子中激发共振(读取噪声)。另一个原因是每次机械旋转需要大量的电循环。仅仅是向前或向后移动转子需要控制器不断循环每一阶段的命令电压,这就会在线圈和电机中产生噪音。
- 振动。以上列出的所有噪声因素也会产生振动。但特别是在微步驱动中,有一种现象可能产生很小的噪音,但可以产生相当大的振动。由于定子/转子齿的几何形状(所有步进电机的特征)和合成b场的特性,驱动信号与平移运动的关系从来都不是完美的。换句话说,所要求的位置和实际测量的位置的图并不是一条精确的直线。这种现象导致在运动时产生有节奏的振动。
- 较低的最高速度。为了准确定位,步进电机只移动少量,以使线圈指令波形相应前进。一个标准的1.8度步进电机每一次机械旋转需要50个完整的电气循环。相比之下,四极无刷直流电机只需要两个电气周期每机械旋转。电机线圈电感限制多快的相位可以改变,因此步进电机往往有更低的最大速度,然后无刷直流电机。
你让我在步进伺服
现在让我们深入研究步进伺服技术,有时也称为闭环步进操作(这个术语有点模糊,因为它也用于描述传统的步进电机控制方案,使用编码器来验证最终位置,从而“关闭”环路)。
步进伺服操作与常规步进电机操作有三种关键方式不同。