
技术论文
成员自2018年以来
性能运动设备的技术控制全球超过600万辆电机。我们提供可靠的多轴运动解决方案和无与伦比的技术支持;电机设置和调整,运动板设计,电气原理图和定制软件/硬件开发服务。性能运动设备提供全系列的智能IC,模块,数字驱动器和电路板,以及易于使用的软件,可以将您的系统快速带到生机。我们直观的开发工具和共同的运动架构使您的动作系统的设计,开发和验证快速,可预测和低风险。业界领先客户的性能运动设备集合为我们提供广泛的应用程序的丰富经验。需要最佳方法来控制多轴应用程序的运动?让我们向您展示我们如何提供帮助。
内容提交:
行业:
电子/电气元件和工厂自动化电子/电气元件,工厂自动化,实验室设备和自动化,医疗设备,军用/防御,运动控制部件制造,制药,机器人和半导体
应用:
N / A.
查看更多
移动和便携式自动化需求光线,高效和冷却操作
发表于08/31/2020.
| By: Performance Motion Devices
在此进入PMD的解决运动控制问题系列我们将专注于移动和电池供电的应用,其中三种特殊要求变得尤为重要:电机和相关控制产生的重量,效率和热量。
移动机器人涵盖广泛的应用程序,包括仓库机器人,无人机,战场机器人,水下机器人,以及或多或少的任何自动化机制,必须在其运营环境中运输。
移动机器人的关闭表兄弟是用户携带或推车的便携式设备。这通常是医疗设备,例如流体泵,药物注入仪和肌肉辅助装置,或手持制造和装配设备,如钻头,扭矩扳手和测试探针。
所有这些应用程序都有共同点是它们是电池供电。电池操作推动了效率的需求,也需要更少的重量,因为较重的机制需要更多的能量来移动。较低的工作温度可能在移动机器人中可能并不重要,但在便携式设备应用中往往非常重要。这是因为手持式或患者磨损的装置中的过热会导致不适或甚至受伤。
所以我们的这个条目共同运动控制问题系列,让我们节食,获得精益,意味着,并保持酷,因为我们向您展示了如何提高移动运动控制的性能。我们会看到除了汽车本身的进步外,在移动运动控制和机器人中驾驶新应用的爆炸,还有一个名副其实的体育馆。
最小化重量
每个运动控制系统都有两个影响其重量的主要元素:电机和驱动该电机的控制器。通过电动机在这里,我们的意思是整个致动器,因此这包括作为致动器组件的一部分的齿轮头或其他减速器,以及任何附着的编码器或传感器的重量。通过控制,我们表示接受来自电池的直流电压的电子系统,接收或内部执行运动移动命令,并最终驱动电动机线圈。
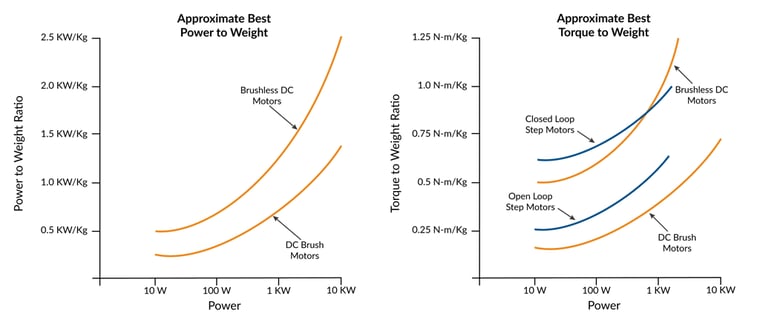
图1:两个关键性能指标中的电机类型的比较
首先,我们将专注于电机。图1显示了两个键在两个关键性能度量中的各种电机类型比较的两个图表:电源输出到重量,扭矩输出到重量。对于给定的应用程序通常,这两个因素中的一个比另一个因素中的一个更重要,实际上,它们与电源被定义为扭矩旋转速率。
如图所示,无刷直流电动机,其能够产生恒定扭矩的能力,通常提供最高的功率输出功率的数字。典型值是DC刷电机的比例的双倍。交流感应电机,有时用于电动车辆的高功率应用,仅在移动机器人中使用,因此这些图形中不包括在内。虽然在移动和便携式应用中经常使用虽然经常用于移动和便携式应用,但通常是重量交谈的一部分,因为它们的扭矩随着旋转速度的增加而迅速下降。
如果我们想要优化扭矩,但是,步进电机返回到桌子上。传统上开环操作的步骤电动机具有高保持扭矩,但它们在工作速度范围内递送扭矩的能力受其振荡倾向的影响。实际上讲这意味着阶梯电机输送的有效扭矩在电机额定保持扭矩的50%至70%之间。
有一种操作的方法,它在很大程度上解决了这个问题。一种称为闭环伺服的技术,也称为步进伺服,使用编码器操作步进电机,就像它是两相无刷直流电一样。结果在电动机的操作范围内显着提高了扭矩,因为中距离不稳定性,用于开环步骤电机的扭矩杀伤器。
关于重量和重量比率的功率和扭矩的最终注意事项是它们通常随着电动机尺寸和功率输出增加而增加。虽然上述图中的所有数字应采用一粒盐,高性能NEMA 17,23和34无刷直流电机拍摄,但可以实现高达1.0 kW / kg的重量比的功率输出。或更高,但较大的电机,例如驱动电动汽车的电动机和提供100千瓦的电源输出或更多的电力输出现在可以实现5.0 kW / kg和更高的重量比率。
这是有两个原因。首先是小电机的固有几何形状,影响它们如何产生和畜栏磁力。电动机效率停留效果,例如杂散磁场和涡流产生,对于大型电动机而言,小型电动机与小型电动机成比例地大。但另一个重要原因是,电动机制造商尚未有动力,以显着增加较小电机的功率和扭矩对重量比。
电动汽车市场在这一领域推动了大量的研究活动,因为它对电机制造商如此大而经济上有价值的市场。移动/便携式运动控制市场,同时也在增长,仍然小得多。然而,至少有一些电动汽车甚至电动飞机市场供电的设计变化可以预期在未来几年内滴落到较小的电机市场。
闭环步进是一个游戏更换器
值得进一步进入新型的用于闭环步进器的步进电机的新型控制技术,也称为步进伺服。是什么使闭环步进器强大的是它可以使用标准步骤电机,但特别是在全方位的操作速度范围内提取更有效的扭矩。
那么闭环步进如何工作?闭环步进电机操作采用常规开环电机运行三个关键方式不同。首先,它需要将编码器连接到步进电机,一个具有相当高的分辨率。对于标准的1.8度步骤电机,您需要每次机械旋转不少于2,500计数的编码器。
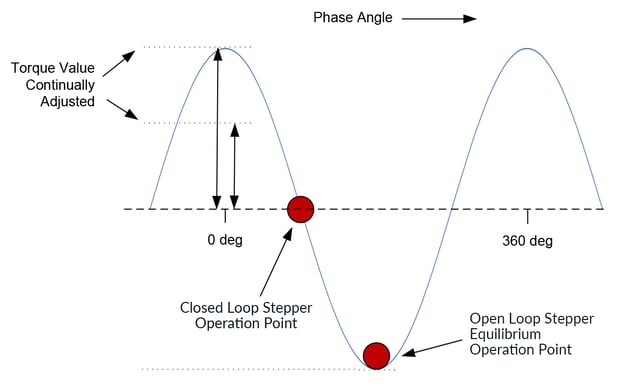
图2:闭环和开放步骤电机操作点
第二区别是闭环步进器像无刷直流电机一样操作电机,并使用实际编码器位置换向相位角。图2显示了相对于传统开环操作点的闭环换向操作点。在该图中,陡峭的曲线,产生的转子扭矩越大。