
技术论文
自2017年起成员
PI是精密运动控制自动化系统、六轴并行机器人级、航空运动系统、甘特林系统、3D打印、激光机械化和派电纳米定位解决方案的主要制造者应用包括光学技术、半导体技术、医学工程、汇编、检验、材料处理和生物纳米技术PI开发并定制精度产品并配有双电磁
内容存档下:
行业:
N/A
应用程序 :
N/A
Piezower弹性纳米器如何工作
OSTED01/03/2023
Piezower弹性纳米器如何工作
Pietower弹性引导纳米定位器,精密运动系统纳米定位扫描提供比路由机械导航系统高性能,如滑动器、横轮或球承接级这是因为弹性制导系统无摩擦性,它不限制分辨率、可复制性、直率和扁平性弹性运动范围相对较短,而在精度、可重复性与几何性能方面,偶电弹性纳米定位阶段优异
.jpg)
微型弹性引导纳米定位器阶段
超快速响应控制输入
Piezo电机制以高速加速能力为名,可达10,000g,当设计为最小移动质量时,为高速扫描和配送应用提供边缘与传统机动级相比,批发电纳米级可提供高得多扫描速度,因为这些级可响应微秒输入信号
Piezo电弹性机制工作方式使用陶瓷传感器效果描述某些材料产生电荷应付机械压力的能力电荷应用派电材料时,电量变形并产生力力,转而可用以生成定位级或驱动器运动位置分辨率仅受电路稳定性的限制,并使用现代电子解析法,次长计解析法是可行的。当使用闭环控制器操作时,纳米可重复性是可以实现的。
Pietower弹性纳米定位器还优于低耗电量,缺少电磁干扰
Viet:Piezo动工原理Piezo弹性运动和Piezo汽车
弹性导师对机械轴承
弹性引导运动依赖固态材料弹性变换或伸缩,消除摩擦和振荡,同时提供高僵硬性、负载容量和抗振荡设计良好时提供极高几何性能,即引导精度测量平面性、直率性、投出率、斜率和滚动率弹性体还免穿免维护免润滑油净室和吸尘器兼容性,不易损耗
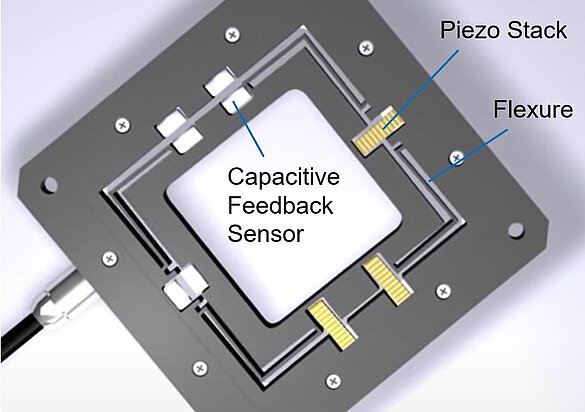
视频:快速纳米聚焦设备配有派索启动器、弹性引导器和电容反馈
长寿派磁电传感器

PI派生纳米定位阶段中心是多层派生电传感器Mars-Rover测试PICMA派索栈。用共生陶瓷封装取代传统相容涂层,它完全排气自由并比传统派生堆栈传感器更好地保护不受环境冲击
纳米定位器阶段度量如何测量纳米分级阶梯
内高精度感应器和闭路控制器至关重要,这样才能实现纳米子辐射计高重复性运动
系统内部计量系统也必须具备测量纳米尺度运动的能力选择阶段度量系统时必须考虑五大特征:直性、敏感度(分辨率)、稳定性、带宽和成本其他因素包括直接测量移动阶段平台的能力以及测量是触点或非触点电磁纳米定位应用常使用三种反馈类型:电容测量传感器(胶片和派索抗冲传感器和LVDT传感器)
电容高日
PI许多纳米定位器使用电容反馈传感器测量基于电容的两个板间距离可无缝融入纳米定位阶段,对大小和质量影响最小能力反馈传感器提供最佳定位解析、稳定性和带宽折中方便直接测量移动平台
PI数字运动控制器数字多线性化机械电子时,整体系统线性误差可低至0.01%,使电容反馈传感器最受青睐的计量系统最难应用
.jpg)
PIPAZO纳米定位平方波信号反应显示实子核定位稳定性、增量运动和双向重复性计量外部电容仪表20m分辨率
视频:电容测量原理安装AFM/SNOM显微镜应用
Strain高格传感器
有两种线程传感器:阻抗膜传感器和分片传感器分片感应器提供更高敏感度,胶片感应器提供更高线性两种类型都绑定为压电传感器或纳米定位阶段弹性元素高分辨率带宽需求极小集成空间并往往偏向成本敏感应用接触类型传感器间接测量位置推理
全桥实现并按轴多线程提供最佳温度稳定性由于缺乏一致性涂层,PIPICMA双火派传感器使得菌株传感器和pizo元素之间能更密切地接触,从而实现更高稳定性和更快响应
LVDT传感器
LVDT(线性可变微分传感器)磁核心嵌入动作控件或纳米定位器中,产生与位置变换成比例的演导法变化LVDT传感器启动非接触直接定位测量成本效益高、高度稳定并可重复使用
并行串行智能多轴机制
实现多轴运动有两种方法:并行运动和串行运动学串行运动定位系统(惯用或叠加系统)比较简单,费用较低实施,但与并行运动定位系统相比,它们有一些限制。
多轴(多度自由)串行运动定位系统中,每个驱动器(和典型的每个传感器)只分配一度自由对比之下,在并行运动多轴运动定位系统中,所有驱动器都直接在同一移动平台上操作(相对固定引用)。允许缩小尺寸和惯性并消除移动电缆引起的微波结果是,对两个轴都可实现相同的共振频率和动态行为好处包括提高动态率和扫描率,改进轨迹引导,提高可复制性稳定化
三维DOFPI XYGAN原理复元,纳米定位器.最小惯性量由单词并行运动学设计成为可能精度、响应性、直率和扁平优于堆叠多轴运动定位系统
直接并行度量-相对于固定引用多轴运动度量
并行运动学为直接并行度量法的实施提供方便。 虽然纳米定位器设计更具挑战性,性能优势显而易见与串行运动学形成对比的是,每个驱动器被分配到特定程度的自由度,并行运动学使所有驱动器能够直接在同一移动平台上操作,相对固定外部引用,导致体积和惯性下降并消除移动电缆造成的微波扰动

spazo弹性引导、6轴闭环采样定位级以并行皮肤设计及定位电容测量器反馈为基础。该级设计面向AFM/半导体应用。XYZ解析优于0.1Nm。多三轴用于报错并实现最高几何性能
使用并行计量传感器阵列可测量相对于固定引用所有受控自由度高多轴精度、可重复性与扁平性,因为所有运动都位于servo-loop内部,而不管由哪个驱动器驱动直接并行度量器还允许僵硬servo设置,导致快速响应时间离轴扰动,无论是内部或外部干扰,如单轴快速步引振动,都可由servo阻塞
.jpg)
纳米比例平面并行式主动式控制纳米定位级超过100x100m扫描范围纳米定位器.
运动接力器纳米定位器
运动控制算法在纳米定位器系统总体性能中发挥重要作用
安市最新一代运动控制器概述.