
技术论文
前向反演算法:解释
OSTED 04/12/2023
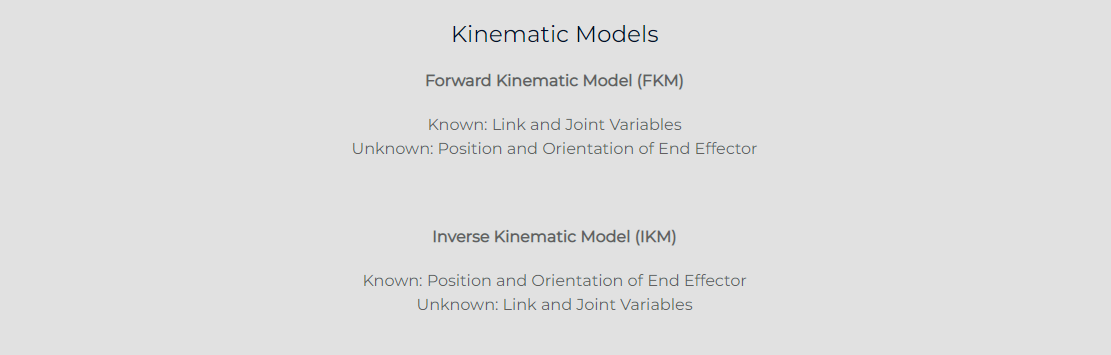
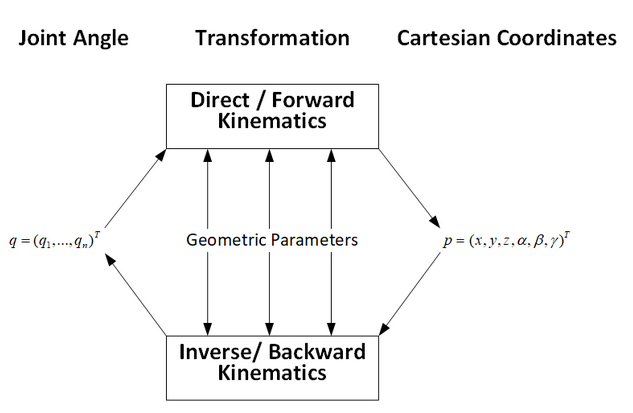
前沿工程学是什么
前端语法学是使用连接端向语法的联结和链路变量计算端向效果器位置和方向从当前位置、角度和方向连接中,可使用前向运动学计算端效果器的方位和方向
精确定位端点很重要,但它依赖全面理解连接端点的关节和链路变量并拥有可解脱模型
反演算法是什么
逆电文学计算连接端效果器的联结和链路变量视端效果器位置定位,反运动学可用于计算关节关联变量,包括位置、角度和方向
适当的路径从一个位置移到另一个位置可用a计算Jacobian矩阵.
\
循环使用这两种计算方法,人既能移动,又能跟踪运动使用连接变量计算端效果器的位置,然后设置端效果器期望位置和方向,然后计算实现此位置和方向所需的接通和链路变量,然后计算运动路径达通所有接通和链路所期望变量,这些变量转而将端效果器移到理想位置和方向进程可重现新端效果器位置和方向
因为这组循环函数回馈错误复合并最终导致系统与现实完全脱节
通常通过检测传感器精度或完全替换传感器读数解决某些变量
记住,整个周期基于理解或关节和链路变量,或端效果器变量并用一计算二
前向反向虚拟技术为何重要
逆文学驱动运动Stewart平台依据自由度举个例子,如果理想运动向侧摇动,否则保持水平,则使用逆虚拟模型计算运动期间每个开动器长度反运动学把运动模拟者所关心的像Surge、Sway、Heave、Rolk、Pitch和Yaw等词翻译入动作者位置命令
前置脚本计算平台顶板位置换句话说,它测量实为Surge、Sway、Heave、Row、Pitch和Yaw发现它使用测长启动器
逆电文学的重要性显而易见:为将平台移到一定位置,逆电文学用于显示如何定位启动者实现该目标前沿脚本学对比较隐蔽案例有用,对虚拟现实应用特别有价值,如下文所示
那个前沿脚本学对比较隐蔽案例有用,对虚拟现实应用特别有价值,如下文所示
上头瑞文6DoF特征超低延迟FKM和IKM计算
人体验虚拟现实时,允许他们在模拟环境中游动或翻转头环顾VR头饰检测运动并报告模拟环境用户运动方式,因此模拟能向用户提供生成视觉
Stewart平台的使用增强虚拟现实经验,并可以帮助消除VR运动疾病从平台上提供运动提示解脱乘员在眼体验运动时感知的断开作用,但内耳不感知的断开作用事发时,脑部相信他们被下毒 导致恶心使用实运动, 内耳体验 相同的现实向眼Stewart平台移动车手满足内部耳产生问题是因为 VR头板分辨不出来它经历的动作 归结于骑手移动头部或平台运动
举两例说明:直升机VR乘送者先靠直立站校正姿势,然后同VR乘送者在虚拟直升机上起降车手校正姿势后 VR头板测量上向运动 车手体验上行下一站 机师起飞 Stewart平台开始上升VR耳机测量向上运动,但这次驾驶舱向上运动驾驶员若每次从驾驶舱顶上举起头来都会混淆不清,Stewart平台运动必须从VR头板测量运动中取消,只留下骑手运动有待实现
前沿脚本技术对完成此任务至关重要动工位置通常测量得非常精确,用于快速计算平台运动,从测量耳机运动中删除加速计等外部传感器有时放上平台并用于帮助运动删除前向工程模型不仅取代这些传感器,而且正确制作时也可以提高延时性、振动阻抗力和一致性
Iris动态Raven-6DoF运动平台开发包FPGA电源FKM和IKM计算,提供行业领先延时令,使它适合VR应用raven-6DOF工具可用于搭建运动平台6度自由以适应任何应用深入了解瑞文6DF.