
社论
成员自2018年以来
RoboDK是一款用于工业机器人和机器人编程的功能强大且成本低廉的模拟器。模拟来自50个不同机器人制造商的超过500个机器人手臂!RoboDK直观的图形界面无需编程技能。https://robodk.com/了解更多
下内容提交:
工业:
机器人机器人
应用程序:
仿真/ 3 d建模仿真/ 3 d建模
工业机器人的最佳范围是什么?
发布01/07/2020
|作者:Alex Owen-Hill
机器人的“到达范围”将决定许多其他因素,例如:工件尺寸,外部轴的需要,等等。但对你来说什么才是最好的?
假设您有一个想要自动化的任务。你知道你想使用一个工业机器人,但你不确定哪个品牌或型号最适合你。市场上有这么多不同的型号,你如何选择呢?
我们有几十个品牌的数百种机器人模型的目录。我们经常需要为客户项目或制作教程选择一个合适的模型。
我们如何在所有不同的机器人之间进行选择?
我们在选择机器人时首先要考虑的一个特性是它的“可达性”。机器人的这个基本特性几乎影响到应用程序设计的所有其他方面。
例如,机器人的范围将决定:
- 你的工件能有多大。
- 是否需要使用外轴。
- 你可以把机器人放在你的工作台上。
- 之后的所有决定…
但是,机器人的范围是多少?你如何判断哪个范围最好?让我们找出答案。
什么是机器人的触角?
顾名思义,机器人的“伸展能力”是衡量机械臂完全伸展时能伸展多远的指标。换句话说,它定义了机器人工作空间的界限。
需要注意的是,这个范围只是机器人工作空间的粗略测量。机器人在一个方向上比另一个方向上有更多的伸展是很常见的,这并没有反映在参数中。然而,这个范围确实给了我们一个机器人的大小和运动能力的大致概念。这就是为什么在选择机器人模型时,它是一个有用的第一个参数。
机器人的伸手范围是由各种物理因素决定的,包括:
- 链接的长度。
- 机器人的整体尺寸。
- 关节的范围(低运动范围的关节可以有低的触及,即使机器人是大的)。
哪些机器人的触角最大和最小?
如果你要选择一个符合你任务需要的达到值,你首先需要知道上限和下限。
在过去,工业机器人的大小有相当小的差异。然而,这些天,有一个巨大的范围。现在你可以找到小到可以放在你手掌上的机器人和大到可以举起1.5吨汽车的机器人。在我们的机器人图书馆中有数百个机器人模型可以与RoboDK一起使用。
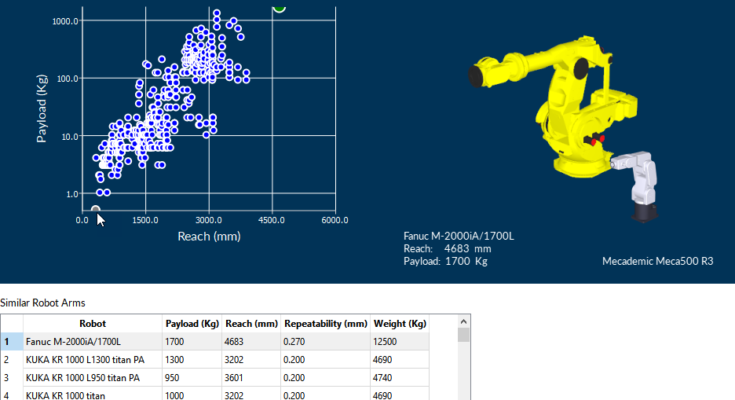
最大射程:发那科M-2000iA/1700L
我们图书馆最大的机器人是发那科的M-2000iA。
它的属性有:
- 达到:4683毫米
- 有效载荷:1700公斤
- 体重:12500公斤
- 可重复性:0.270毫米
这个最大的机器人身高超过4米,重达12吨,最适合于涉及非常重、大载荷的大型任务。
最小范围:Mecademic Meca 500 R3
我们图书馆里最小的机器人是来自Mecademic的微型Meca 500。
它的属性有:
- 达到:330毫米
- 有效载荷:0.5公斤
- 重量:4.5公斤
- 可重复性:0.005毫米
在最小的一端,只有几百毫米,这个微型机器人的目标是桌面应用程序。这个小尺寸也允许它非常精确-它有最低的重复价值的6自由度机器人在写的时候。
看看我们的工业机器人抓取工具
我们有一个互动工具,展示“可触及工业机器人手臂”。有了它,您可以从我们图书馆的所有机器人中快速跳转到最适合您的任务的范围。
为你的任务选择最佳范围的5个步骤
机器人模型有这么多选择,要确定哪一个最适合你的任务,最好的方法是什么?
以下是你可以使用的五个步骤:
1.确定任务需求
首先,查看您想要自动化的任务,并清楚地列出执行该任务所需的内容。
决定机器人电池的布局,并找出你的产品将通过它的路线。从这些信息中,你可以开始了解机器人完成任务所需的属性,包括所需的范围。
2.选择重要的规格说明
并不是所有的机器人规格对你的任务都很重要。例如,拾取和放置任务通常不需要很高的精度,所以机器人的可重复性不是很重要。如果空间有限或工件很大,机器人的尺寸(反映在其触及范围内)将是至关重要的。
3.寻找一个合适的机器人
根据任务的需要,确定机器人的关键规格的粗略值(即可达性、有效载荷、重量和可重复性),并按重要性排序。然后,选择一个机器人与所需的reach使用我们的reach工具。
记住,你的任务所要求的伸展能力和机器人的伸展能力是不完全一样的。拥有一个比你需要的范围更大的机器人几乎总是一个好策略,因为许多机器人在工作空间的边缘不那么灵巧。
4.发现类似的机器人
当你找到一个合适的机器人时,看看有相似规格的机器人。
有两种方法可以做到这一点:
- 使用我们的交互式机器人比较图表来比较不同的属性。
- 使用机器人库中的过滤器来找到具有类似属性的机器人。
5.比较和选择
你可能最终会得到一些适合你的任务的机器人。比较它们的一个好方法是在机器人dk中测试它们。
为你的任务建立一个虚拟模型,并测试几个不同的机器人。你应该很快就会开始感觉到哪种机器人最适合你的任务。