
案例研究
Hermary是机器视觉技术的领先创新者。27年来,他们致力于协作和创造性地解决问题,从而推动了工业自动化的发展。他们继续在设计和工程方面设立新的行业标准,使效率和生产力达到更高水平。Hemary扫描仪已被证明是行业中最值得信赖和可靠的——它们工作得更好,寿命更长,并提供更大的投资回报。
下内容提交:
工业:
N/A
应用程序:
N/A
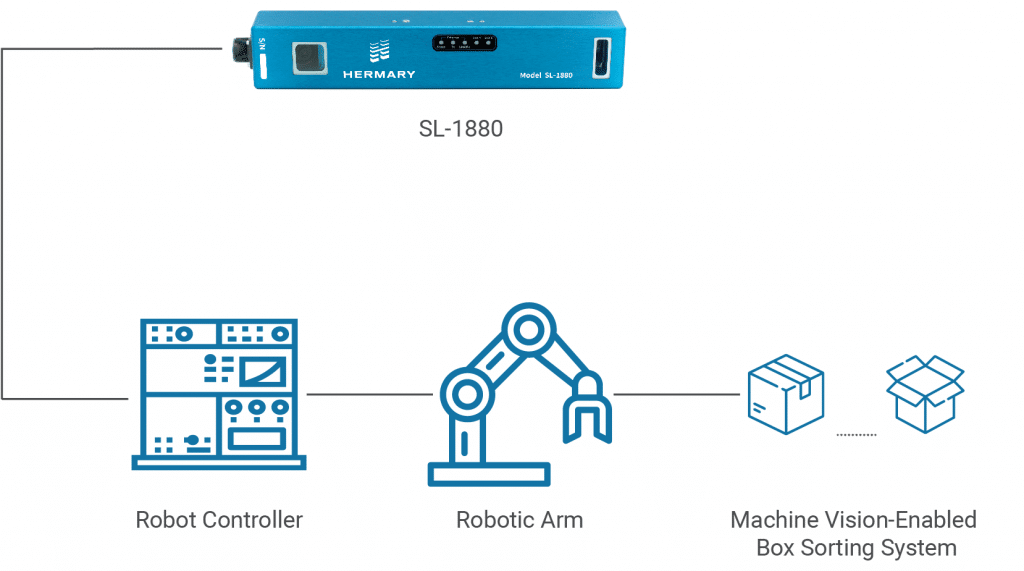
智能仓库管理的可视化盒子分类
发布04/23/2021
介绍
仓库和配送中心已经使用OCR扫描仪(2D扫描仪)根据运输标签将箱子分类到不同的堆栈。然而,仓库管理人员很快意识到,仅仅扫描标签是不够的。一次又一次,机器人托盘会捡起损坏的盒子,有打开的襟板或错误的尺寸,并把它们放在托盘上。这些箱子会破坏包装模式,有时会造成货物损坏。
仓库需要一个3D扫描解决方案,可以准确测量箱子的尺寸,如果有任何不规范的地方,可以将箱子的尺寸整理出来。简单地说,他们需要机器人托盘“看到”他们所处理的东西。
系统需求
分类系统必须容纳不同形状和大小的盒子,并在任何参数不满足时发出一个触发器。参数是挑出有开褶、鼓胀或尺寸错误的盒子。根据触发信号,盒子被转移到另一个传送带,在那里操作员可以重新包装它。对于快速移动的配送中心,扫描器必须足够高效,以每分钟至少处理150个箱子。
系统描述
在这个应用程序中,sl - 1880全集成3D扫描仪用于盒子分类系统,以验证每个盒子的关键特征。3D图像用于验证每个盒子的尺寸,建立一个三维模型,然后在每个盒子通过时检测有开放襟翼或其他不规则的盒子。盒子被相应地排序,下一个盒子进入系统。如果一个或多个参数不正确,则生成拒绝代码,并将框从行中分离出来。
 结论
结论
有了可靠的3D机器视觉,盒子分拣系统实现了99.9%的分拣精度,能够在每分钟150箱的工作能力。新改进的流程意味着分拣需要更少的人力监督,仓库可以信心十足地满足及时交货的需求。