
案例研究
IDS是一个带USB或Gige接口的工业摄像机的领先制造商。对于快速,简单,精确的3D机器视觉任务IDS提供Ensenso系列。使用基于新的Vision应用程序的传感器和IDS的摄像机NXT,该公司在图像处理中开辟了一个新的尺寸。无论是在工业还是非工业环境中:IDS摄像机和传感器在全球范围内协助公司的优化过程,确保质量,驾驶研究,保护原材料和服务人员。它们为您的应用提供可靠性,效率和灵活性。
下内容提交:
工业:
N / A.
应用程序:
N / A.
小心轻放
发布06/25/2021
|作者:Silke v.Gemmingen,具有Ensenso 3D摄像头的机器人辅助系统,用于安全处理核废料

小心轻放
具有Ensenso 3D摄像头的机器人辅助系统,用于安全处理核废料
核设施的退役给运营商带来了重大挑战。无论是退役还是安全安全壳,世界范围内的核废料处理量正以惊人的速度增长。处理核废料越来越需要自动化,但出于安全原因,核工业不愿采用完全自主的机器人控制方法,而远程控制的工业机器人在危险环境中更受青睐。然而,在操纵杆和视频监控摄像机的帮助下遥控抓取或切割未知物体这样复杂的任务是很难控制的,有时甚至是不可能的。
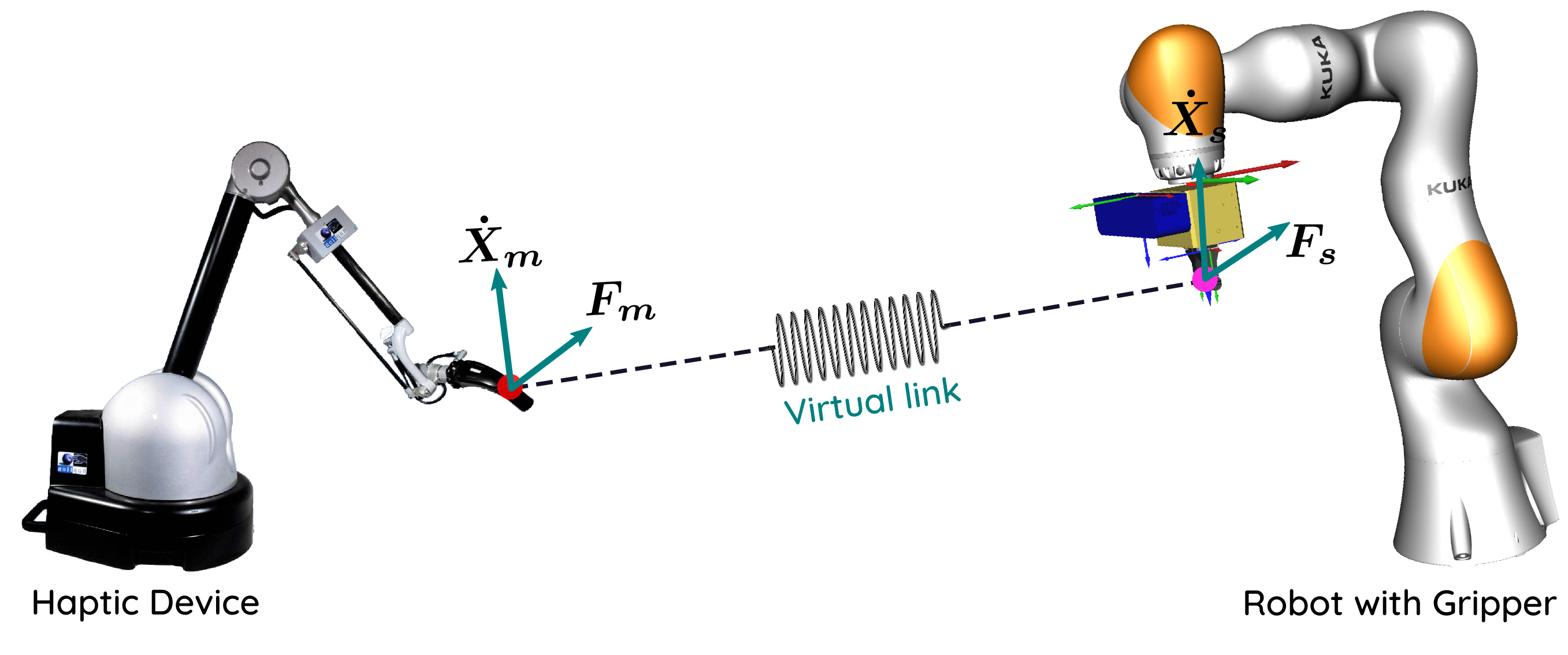
为了简化这一过程,由英国伯明翰大学极限机器人实验室领导的国家核机器人中心正在研究核废料的自动处理方案。在那里开发的机器人辅助系统使“共享”控制执行复杂的操作任务,通过触觉反馈和视觉信息提供Ensenso 3D相机.在系统出现故障的情况下,始终在回路中的操作员可以控制机器人的自动动作。
应用程序
任何尝试过Fairgral Grab Machine的人都可以确认它:手动控制抓住武器是无所事事的。当试图抓住填充的兔子时,由于它的无害,因此在处理放射性废物时失败的尝试可能会像戏剧性一样戏剧性。为避免对人类和环境的严重后果造成损害,机器人必须能够极其准确地检测场景中的放射性物体,并以精度行为。操作员实际上是他手中的,由此取决于他识别正确的抓握位置。

同时,他必须正确地评估逆运动学(反向变换)和正确地确定机器人的手臂元件的关节角度,以正确地定位它,避免碰撞。英国研究人员开发的辅助系统大大简化和加快了这项任务:配备了一个标准的工业机器人,配备了一个平行颚钳和一个Ensenso N35 3D摄像机。
该系统自动扫描未知的废弃物体,并以点云的形式创建它们的3D模型。这是非常精确的,因为Ensenso 3D摄像机是根据空间视觉原理(立体视觉),这是以人类视觉为模型的。两个摄像机从不同的位置观察物体。虽然两个摄像机图像的图像内容看起来是相同的,但它们显示了所观察物体的位置不同。由于摄像机的距离和视角以及光学的焦距已知,Ensenso软件可以确定每个图像像素的目标点的三维坐标。在这种情况下,使用相机的不同扫描位置捕捉场景,并结合从所有视角得到一个完整的3D表面。Ensenso的校准程序有助于将单个点云转换为一个全局坐标系统,从而改善完整的虚拟图像。由此产生的点云包含了所有空间对象信息,这些信息需要向机器人传递正确的抓取或切割位置。

放射性环境中金属物体的极端机器人实验室的3D视觉引导半自主机器人切割。
在软件的帮助下,Enseno 3D相机接管了操作员的深度信息的感知和评估,其认知负载由于结果而显着降低。辅助系统将对象的触觉特征与特殊的夹持算法相结合。“我们的系统使用了场景云,以自动产生多个稳定的抓握位置。”由于3D相机捕获的点云是高分辨率和密集的,因此可以为场景中的每个物体产生非常精确的抓握位置“核电机构中心高级研究科学家Naresh Marturi博士。基于这一点,我们的“假设排名算法”确定了基于机器人当前位置的下一个对象,“Naresh Marturi博士博士解释说国家核机器人中心研究科学家。
这一原则类似于技能游戏《Mikado》,即玩家必须在不移动其他棍子的情况下一次性拿走一根棍子。所述确定的路径引导使机器人能够沿着所需路径平稳、均匀地导航到目标夹持位置。与导航系统一样,该系统支持操作人员引导机器人手臂安全抓取,如有必要,还可以通过其他未知和危险物体。该系统为此计算出一个安全的通道,并通过触觉反馈帮助操作员不离开通道。
该系统将操作员的自然手动运动实时且可靠地实时到机器人的相应运动。因此,操作员始终保留手动控制,并且能够在组件故障中接管。他可以简单地扭转AI,并通过关闭“力反馈模式”来返回人类智能。根据人与机器之间的共享控制原则,因此系统始终仍然在控制中 - 在具有最高危险程度的环境中必不可少。
相机
“对于我们所有的自主掌握规划,遥控和视觉对象跟踪任务,我们使用Ensenso N35模型3D相机,其中蓝色LED(465nm)安装在机器人的末端执行器上以及其他工具上,”Naresh Marturi博士说。来自极端机器人实验室的大多数系统到目前为止已经配备了一个3D相机。“然而,最近加快了3D模型建筑的过程,我们已经升级了我们的系统,以便使用额外的三场坐骑eNSenso 3D相机以及机器人的一个车载。”
Ensenso N系列注定要完成这项任务。它是专门为在恶劣环境条件下使用而设计的。由于其紧凑的设计,N系列同样适用于节省空间的固定或移动使用的机器人手臂,用于移动和静态物体的3D检测。即使在光照条件恶劣的情况下,集成投影仪通过随机点图案的模式掩模,将高对比度的纹理投射到待成像的物体上,从而补充其表面不存在或只有弱存在的结构。N30型号的铝制外壳确保了电子部件的最佳散热,因此即使在极端的环境条件下也能稳定地输出光。这确保了3D数据的高质量和稳健性。即使在光照条件恶劣的情况下,集成投影仪通过随机点图案的模式掩模,将高对比度的纹理投射到待成像的物体上,从而补充其表面不存在或只有弱存在的结构。
Ensenso N相机系列的相机易于设置和通过Ensenso SDK.它提供基于gpu的图像处理,以更快的速度进行3D数据处理,并能够输出多摄像机操作中使用的所有摄像机的单个3D点云,这是在这种情况下所需要的,以及从多个观看方向实时合成的3D点云。
对于辅助系统,研究人员用c++开发了自己的软件来处理摄像机捕捉到的三维点云。“我们的软件使用Ensenso SDK(多线程)和它的校准程序将纹理覆盖在高分辨率点云上,然后将这些纹理点云转换成一个世界坐标系统,”Naresh Marturi博士解释道。“Ensenso SDK很容易与我们的c++软件集成。它提供了各种直观的功能和方法来捕捉和处理点云以及相机图像。此外,在CUDA的支持下,SDK例程使我们能够注册多个高分辨率点云,在全局框架中生成高质量的场景云。这对我们来说非常重要,尤其是要产生精确的抓取假设。”
系统主要优点:
- 操作人员无需担心场景深度或如何到达物体或在哪里抓住它。该系统可以找出背景中的一切,并帮助操作人员准确移动到机器人最能抓住物体的地方。
- 随着触觉反馈,运营商即使当机器人不存在于它们面前,也可以在他们的手中感受到机器人。
- 通过结合触觉和抓取规划,操作人员可以非常容易、非常快速地移动远程场景中的物体,认知负荷非常低。
这节省了时间和金钱,避免错误并提高安全性。
前景
伯明翰的极端机器人实验室的研究人员目前正在开发方法的延伸,以允许使用多指手而不是平行的颚夹。这应该在夹持复杂物体时增加灵活性和可靠性。将来,操作员还能够在抓住物体时感受到遥控机器人的手指的力。还正在开发完全自主抓握方法,其中机器人臂由AI控制并由自动视觉系统引导。该团队还在努力通过“共享控制”系统来改善人员机器人协作以改善人员机器人协作。
这是为我们所有人的安全和健康而采取的一种有希望的办法:处理核废料等危险物体最终是我们所有人关切的问题。通过可靠地捕捉相关物体信息,Ensenso 3D摄像机正在为这项全球普遍存在的日益紧迫的任务做出重要贡献。
阅读更多:https://en.ids-imaging.com/casestudies-detail/handle-with-care.html.