
案例研究
成员自2018年以来
RoboDK是一款功能强大、性价比高的工业机器人和机器人编程模拟器。模拟来自50个不同机器人制造商的500多个机器人手臂!无需编程技能,直观的RoboDK图形界面。https://robodk.com/了解更多
下内容提交:
工业:
航空航天航空航天
应用程序:
材料去除/切割/去毛刺/磨削/无形检查材料去除/切割/去毛刺/磨削/无形检查
案例研究:凯恩机器人如何利用RoboDK实现轨道抛光
发布09/08/2020

用机器人进行表面处理——这是一个你以前可能没有考虑过的应用。
你可能想知道:是否有一个好的末端执行器来执行打磨或抛光机器人?用这样的末端执行器给机器人编程有多简单?
但是,凯恩机器人公司的团队找到了一种方法,可以轻松地将他们的机器人和新的轨道打磨末端执行器与RoboDK集成。
让我们看看他们是怎么做到的!
砂光和抛光是传统上很难自动化的任务类型。在过去,你要么得花大把钱买一台自动砂光机——这种机器会占据你车间一半的空间,而且成本不高——要么就得手工完成这项任务。
手工做表面处理的问题是,它是耗时的,体力劳动,并提供一个不一致的质量。听起来像是机器人的完美任务!
近年来,用工业机器人进行表面处理已经成为一种可行的选择。通过在机器人的末端执行器上添加一个力传感器,您可以使用力控制来提供与轨道砂光工具一致的表面光洁度。
因此,工业机器人现在可以用于要求高度一致性的表面处理任务,如飞机的螺旋桨叶片抛光……
这正是凯恩机器人的团队所做的。
引入…凯恩机器人
凯恩机器人是一家总部位于美国加州的自动化集成公司。他们主要服务于航空和航空航天部门,并为高混合/低产量制造商提供自动化解决方案。
他们将公司的使命描述为:“通过使用创新的、低成本的、灵活的自动化解决方案,将熟练的航空航天工人从耗时、重复性的制造任务中解放出来。”
特别是,他们帮助航空航天制造商的应用,如研磨,砂光,整理,环氧树脂分配,钻孔和机器护理。
该公司的项目包括为飞机抛光螺旋桨叶片。
项目名称:螺旋桨叶片抛光
螺旋桨叶片是一件精巧而令人印象深刻的工程。它们是飞机在空中获得推力的主要手段。制造过程中的任何错误都可能导致飞机的推进效率低下,最坏的情况下,甚至会导致灾难。
抛光阶段在飞机制造中至关重要。糟糕的表面处理会在空中造成不必要的阻力,导致飞机消耗更多的燃料。
此外,美国联邦航空管理局(FAA)强烈建议不要抛光后的螺旋桨已经制造,因为它可能会损害脆弱的保护涂层添加到叶片的表面。因此,制造过程中的抛光阶段是获得最重要的表面光洁度的最后时刻。
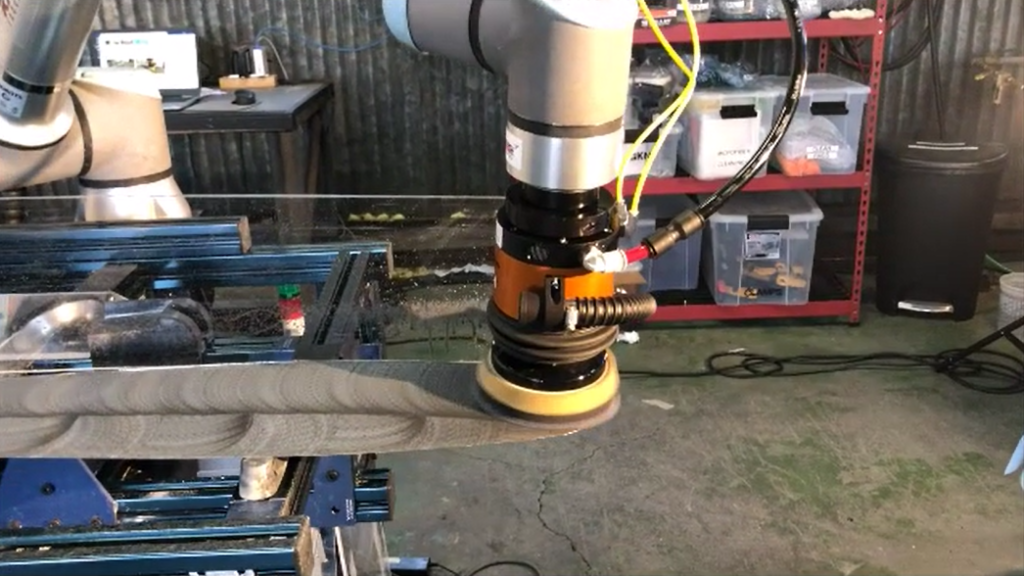
凯恩机器人公司(Kane Robotics)的团队开始使用机器人和一种专为机器人表面抛光设计的新型轨道砂光末端执行器来生产抛光应用。
要求机器人使用该末端执行器精确抛光螺旋桨叶片。

集成机器人准备的轨道Sander与RoboDK
该团队接受该项目的一部分是测试他们正在使用的新轨道砂光末端效应器。
机器人表面加工的一个常见问题是它需要力控制。当我们用手工砂光或抛光时,我们可以精确地控制精加工工具施加的力。对于机器人,最常见的方法是添加一个力传感器,并将主动顺应性编程到工具中。这可能很难编程。
凯恩机器人所使用的末端执行器使它比过去更容易部署机器人表面处理,因为它将依从性纳入了工具本身。
柔顺的轨道砂光机
这个末端执行器是AOV-10符合ATI的轨道砂光机,也可作为UR+组件。
这种新工具是特别设计的,使机器人砂光容易。它将气动顺应性整合到轨道砂磨工具的轴线上,使机器人能够对工件表面的细微变化做出反应。
正如凯恩机器人公司(Kane Robotics)首席运营官艾伦·希肯(Alan Hiken)所解释的那样:
“打磨头是一种被动兼容的头部,运动垂直于工具表面。调节空气被交付给“延伸”和“合同”港口,这控制了较大的“僵硬”。
这要求我们进行一些试验,以确定所需的空气压力,以实现预期的性能。”
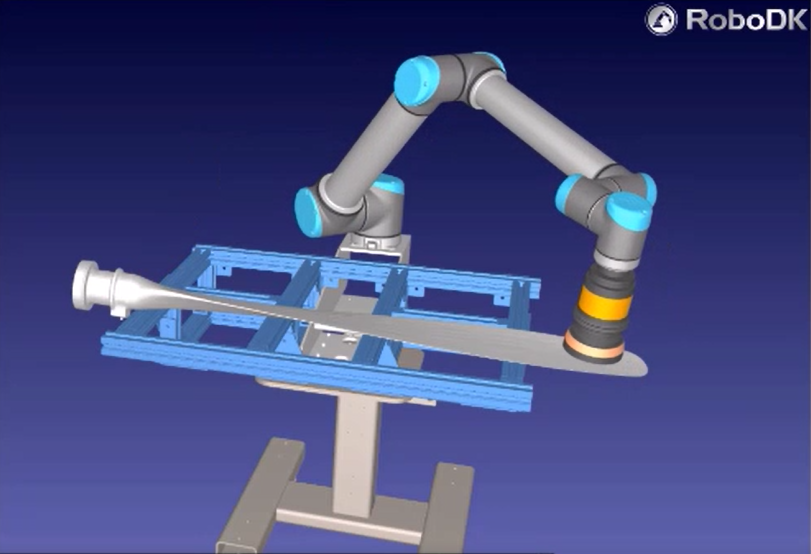
使用RoboDK与新的End of Arm工装(EOAT)选项的一个好处是,它很容易在软件中添加一个新的末端执行器,正如我们在上一篇文章中解释的那样使用RoboDK的任何末端执行器5分钟指南。
他们的硬件和软件设置
凯恩机器人使用的团队使用的设施相当简单,归功于ATI砂光工具。
其设置的主要组成部分是:
- 通用机器人公司的合作机器人。
- ATI AOV-10轨道砂磨工具。
- 螺旋桨叶片固定在上面的桌子
- RoboDK离线编程。
如果没有这种特殊的轨道打磨机,团队可能不得不集成一个外力传感器。这将增加机器人硬件设置和编程的复杂性。
使用RoboDK,他们的编程很简单。
为什么凯恩机器人使用RoboDK?
RoboDK允许团队快速轻松地启动和运行应用程序。
编程只包括一个路径规划活动,在RoboDK中只需几个步骤就可以实现。
这是Coo Alan Hiken关于Robodk的原因:
“RoboDK是市场上价格最具竞争力的OLP软件,他们对凯恩机器人的支持非常出色。对于低成本来说,(该软件)非常有价值,而且正在定期添加新的功能,使其更容易与各种eoat一起使用。”
当被问及为什么使用RoboDK时,他简单地说:“如果你有CAD数据,为什么不使用它呢?”
我们几乎不能争辩!